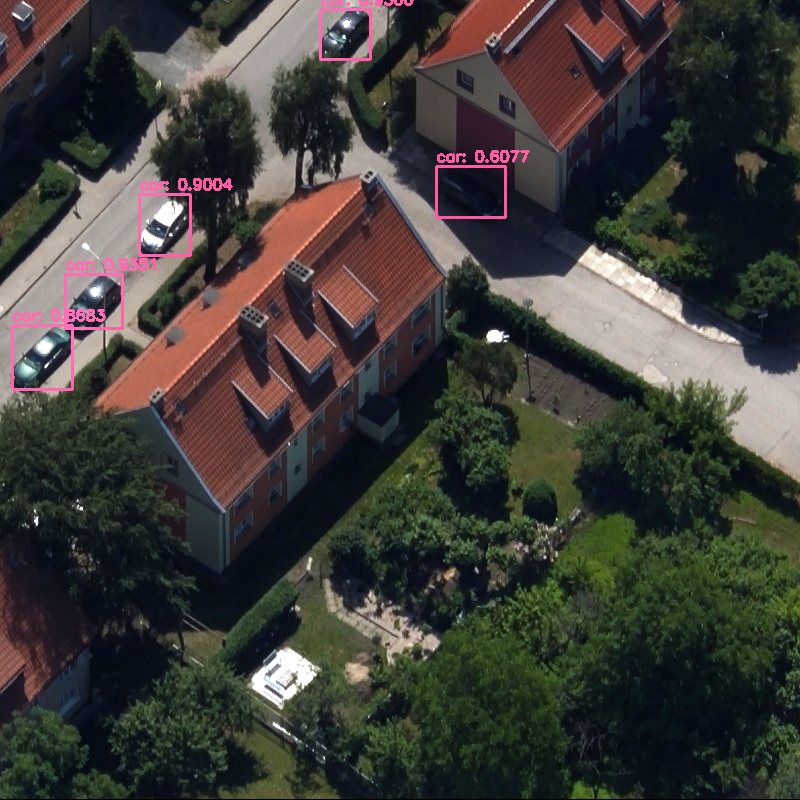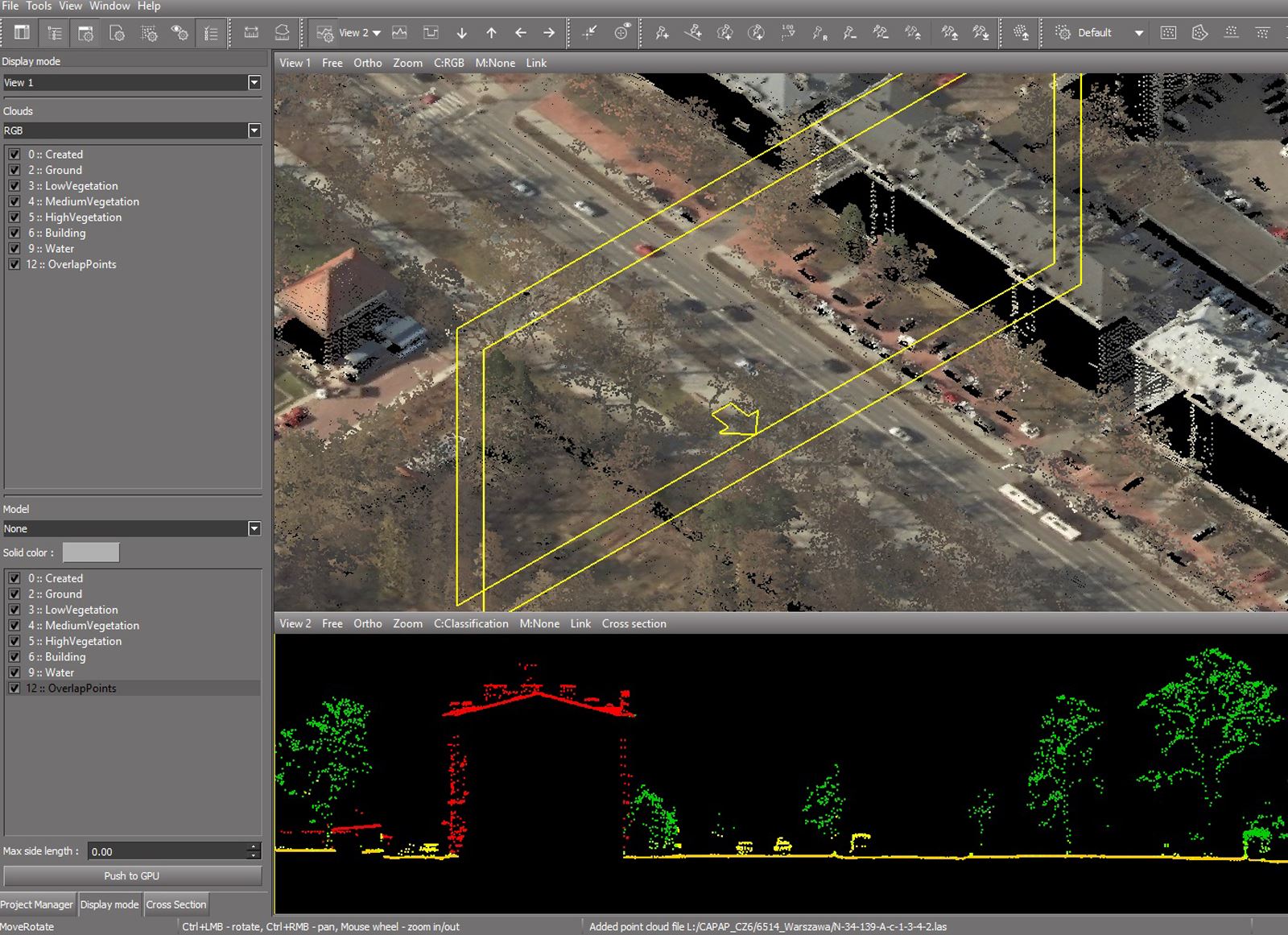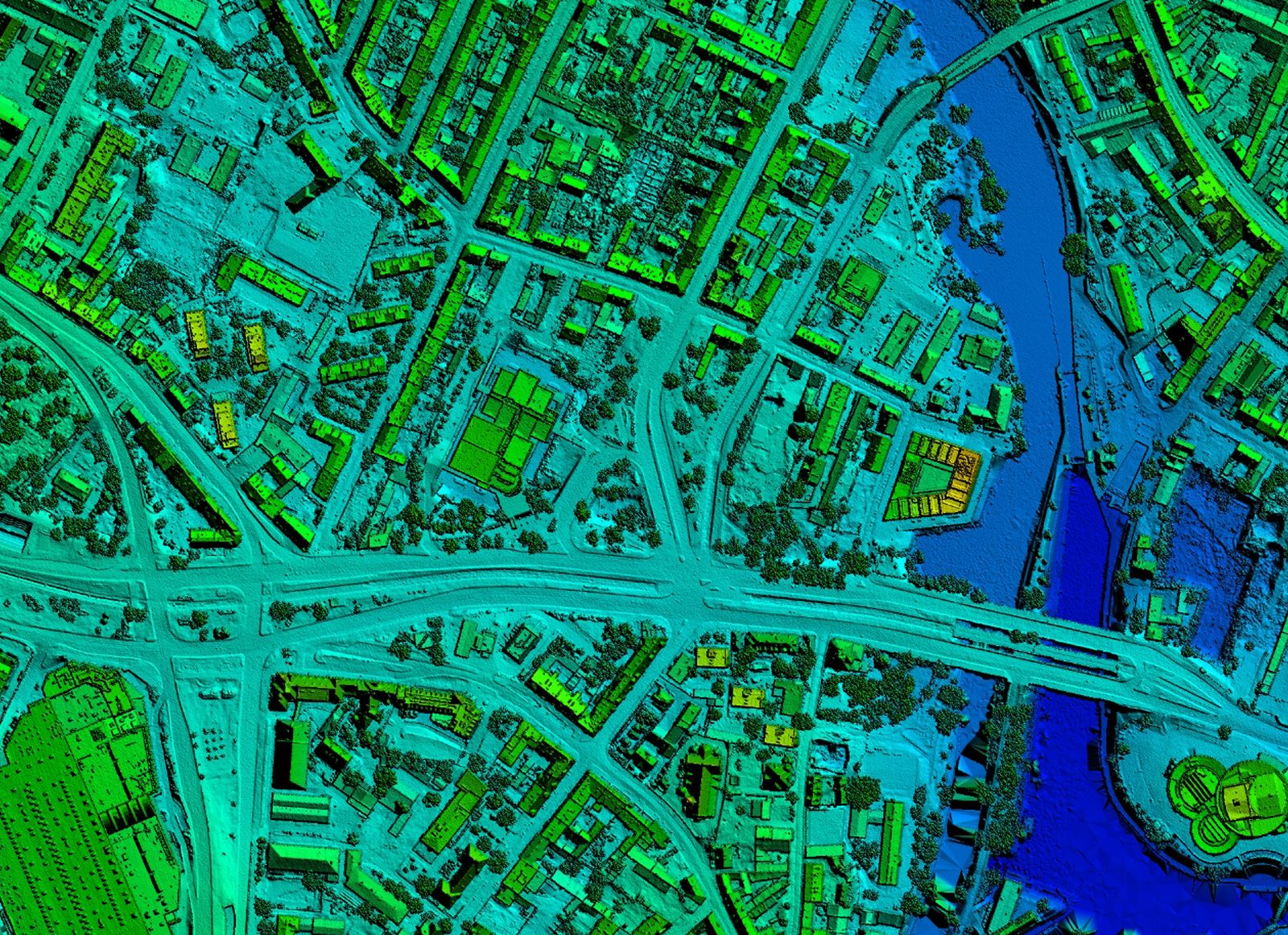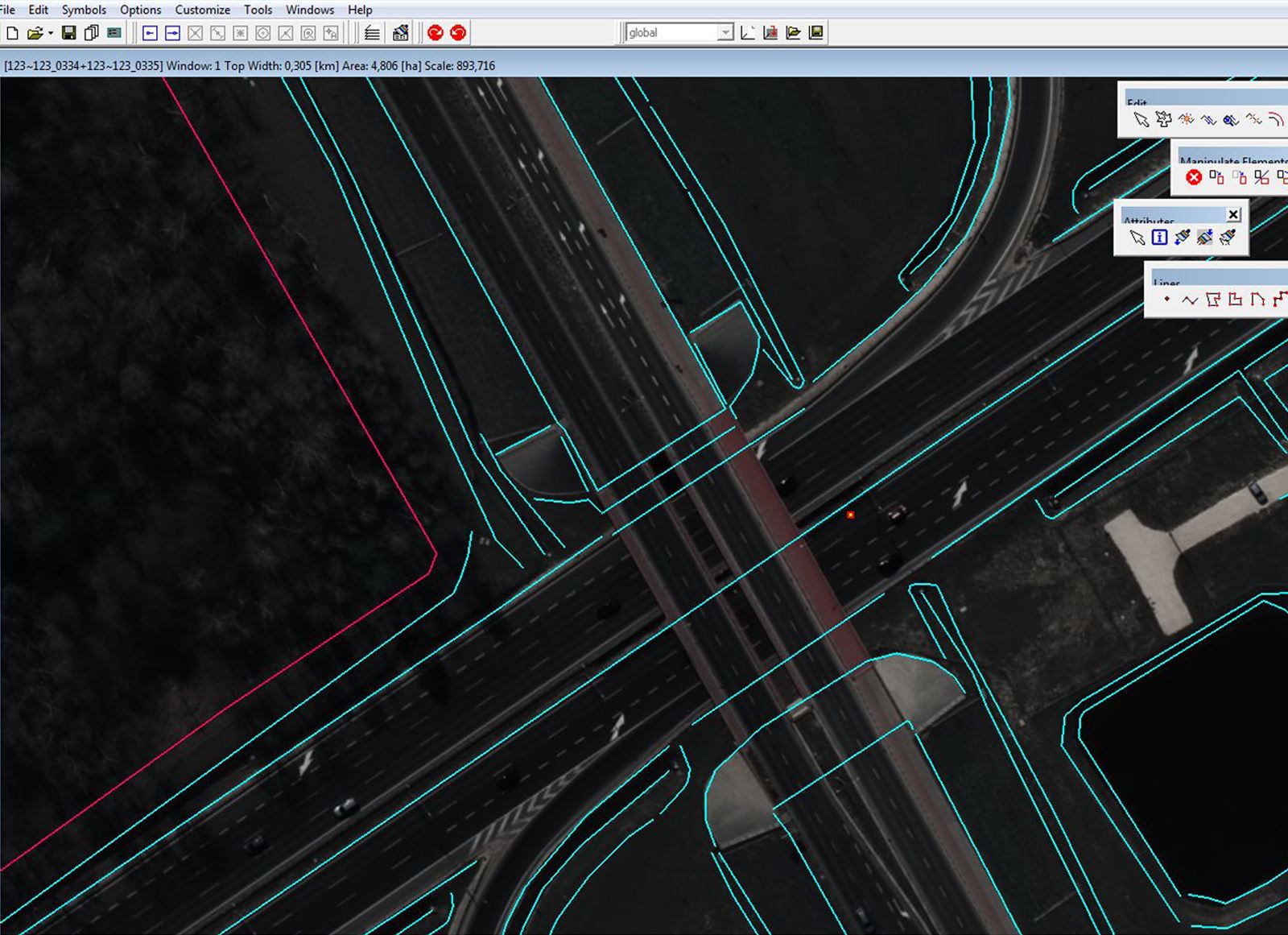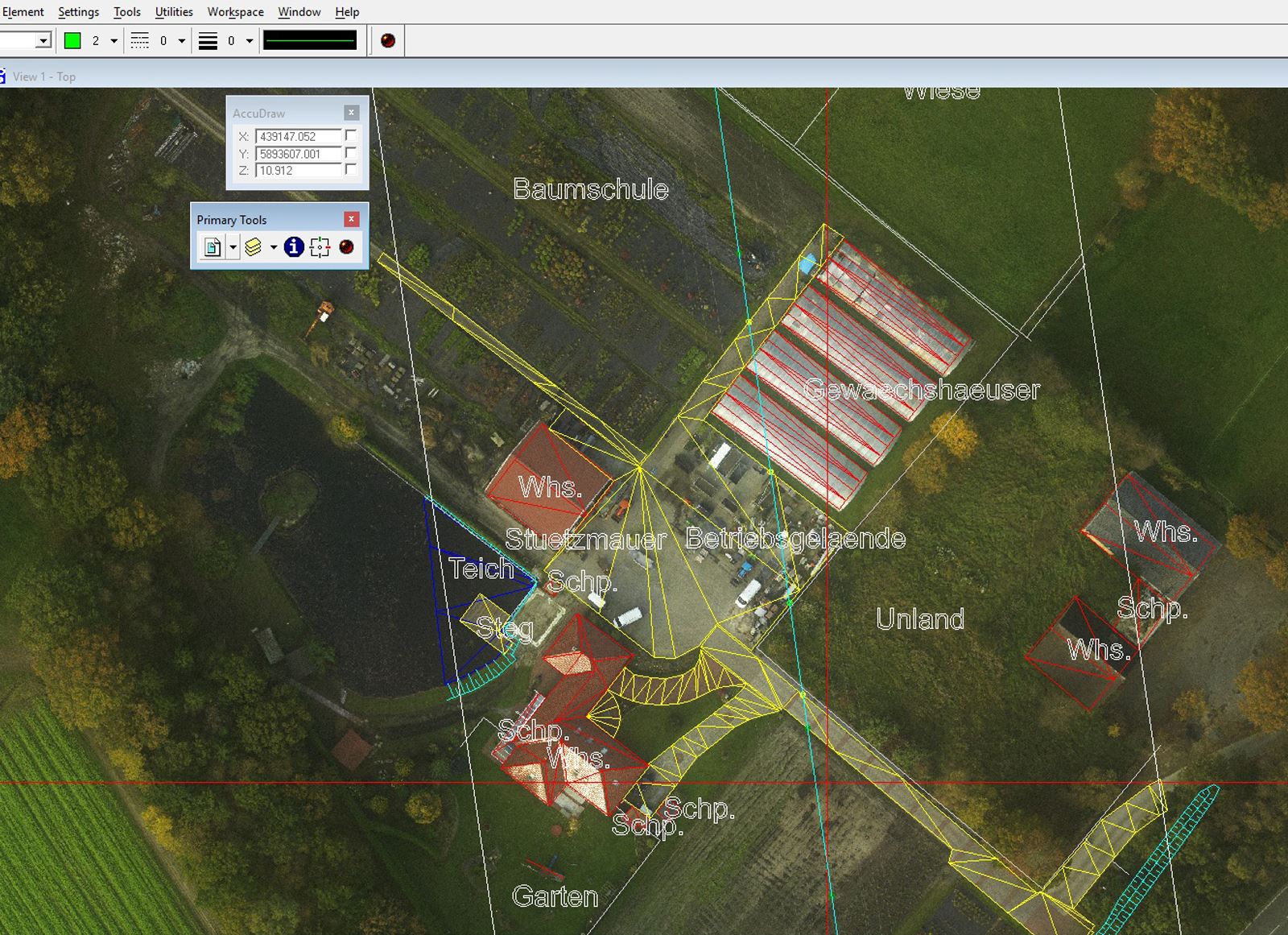


Using data from our hybrid airborne sensor, we integrate 3D Mesh models of the highest quality with semantic information. Such combination of 3D mesh models fragments with information about objects representing them is based on the results of semantic segmentation of oblique images and point clouds.
The technology was developed in collaboration with scientists from the Warsaw University of Technology.